
SPARKmini Usage
Firmware
You can control the SPARKminis using a simple PWM signal. The width of the pulse determines how fast and in what direction the motor spins. For STORM 2026 we set the PWM frequency at 333 Hz, which corresponds to half of the expected pulse width at neutral (1500 us), although the absolute min and max of digitalWrite at that frequency exceed those of the SPARKmini. The firmware we used is on the GitHub, and instruction for setting it up and running it can be found on the README.
Electrical
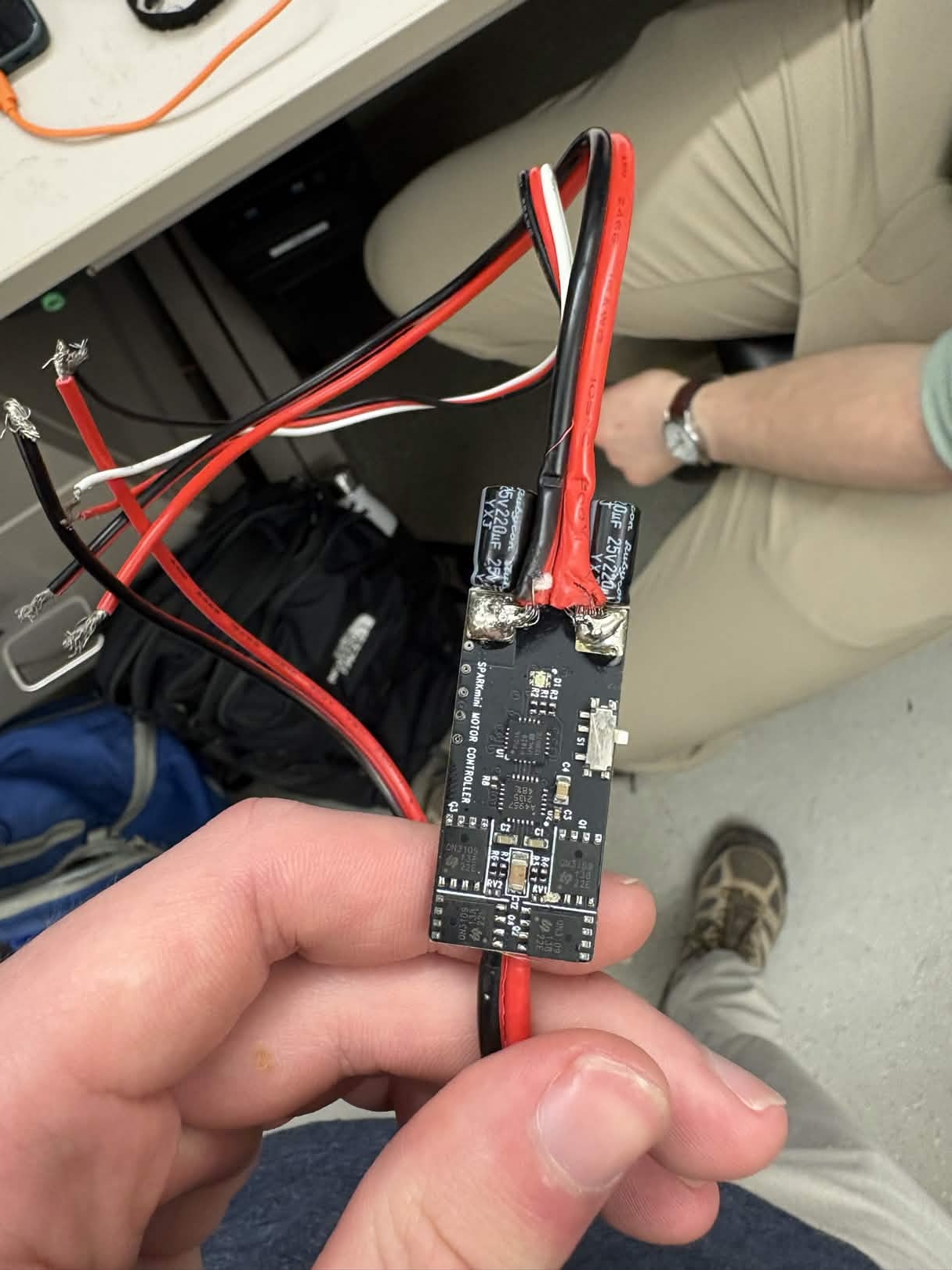
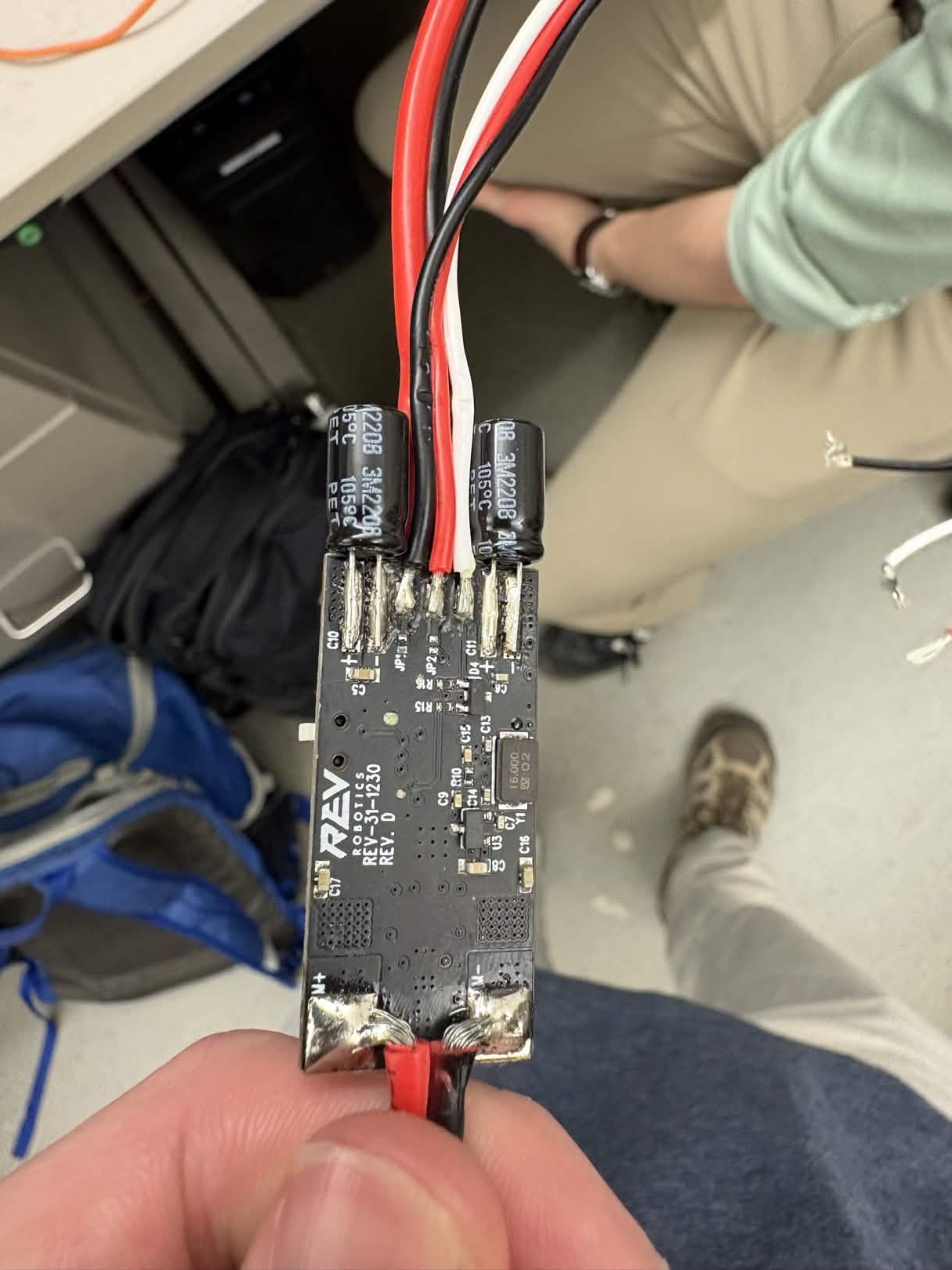
The wires labelled "POWER" on the SPARK mini should be connected to +12 volts and ground. The wires labelled "POWER" are the output wires and connect to your motor. The SPARKmini does NOT have reverse polarity protection! Make sure the wires are connected properly. To control the motor controller, give a 3.3 or 5 volt PWM signal to the white wire of the 3-pin servo connector. The ground of the servo connector can be connected, but the red wire is disconnected from the controller. You do not need to supply it with separate power. The inside of the SPARKmini is shown below:
Firmware
{something about using the Servo or Motor.h classes}
{maybe insert some screenshots too}